






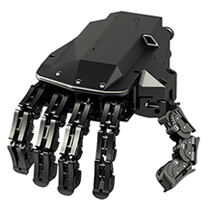
qb SoftHand RESEARCHは教育分野、とりわけ研究室や大学、実験室向けに開発された人間の手を模したロボットハンドです。soft-roboticsテクノロジーを基本とし、周囲の人や物を傷つけることなく、ロボットハンド本体も損傷するこ無く様々な用途に柔軟に対応することができます。様々な物体を形状に合わせて制御動作を変更せずにつかむことができるシンプルさとしなやかさが特徴です。
ソフトな感触を特徴とした qb robotics のロボットハンドは、人間との共同作業の中で予期しない危険に対する安全性だけではなく、制御動作を変更せずに様々な物を物体の形状に合わせて掴むというシンプルさと、本来あるインテリジェントデザインの相乗効果を活用しています。
これまでにはない考え方を組み合わせることで、qb SoftHand RESEARCH は様々な種類の物体をつかめるしなやかさを持ったロボットハンドになっています。1個のモーターで作動し、プラグアンドプレイにより制御信号1つで手を結んだり聞いたりできるためコストも抑えることができます。


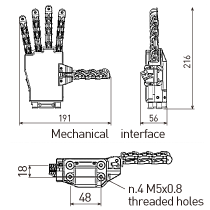

| 機構 | ||
| 質量 | 0.5kg | |
|---|---|---|
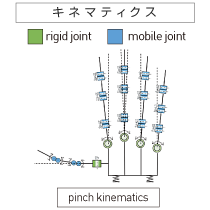
| 指部 | 本数 | 5 |
| 関節数 | 総数 非駆動 駆動 |
19 5 14 |
| モーター数 | ブラシ付DC | 1 |
| 把持力 | にぎる つまむ ぶらさげる |
定格 1.7kg(ピーク 1.7kg) 定格 0.83kg(ピーク 0.83kg) 定格 20kg(ピーク 20kg) |
| 把持力(最大) | にぎる つまむ |
定格 62N(ピーク 75N) 定格 11N(ピーク 11N) |
| 指部 開閉時間 | 全閉 全開 |
1.1s 1.1s |
| 耐久性 | 耐久回数 | 50000 |
| 弾性 | ||
| 指1本 | 衝突速度 | 4.4m/s |
| 指4本 | 衝突速度 | 4.7m/s |
| 指5本 | 衝突力 | 200N |
| 電源DC24V | ||
| 消費電力 | 定格 待機時 |
30W 1.4W |
始動電流 |
6.51A | |
| 通常時の電流制限 | 定格 最長連続稼働時間 デューティー比最大 |
0.75A 300s 69% |
| ピーク時の電流制限 | ピーク時 最長連続稼働時間 デューティー比最大 |
1.1A 20s 56% |
| 制御 | ||
| 対応OS |  |
|
| 制御 | モーター位置フィードバック、電流フィードバック | |










