






Mercuryロボット「Scamper®(スキャンパー)」シリーズは高度なロボット制御システムを構築する為に、「Raspberry Pi ®」を搭載した、研究・開発・教育用のロボットです。Omniホイールの3輪タイプとMecanumホイールの4輪タイプの2シリーズをラインナップしており、その特徴的な車輪は、回転速度と回転方向を変えることにより、その場での方向転換やあらゆる方向への自由自在な移動が可能です。

- ROSを用いたロボットの開発
- WiFiを利用したロボット・リモートPCとの通信
- USBカメラを用いた簡単な画像処理
- USB・Ethernet・I2Cポートによる高い拡張性
- 32bitマイコンを搭載した専用ドライバによる滑らかなモータ制御
開発環境
- ROSを用いたロボット開発
- C++,Pythonでのロボット開発
- OpenCVによる画像処理
- 専用APIによるROSを用いないロボット開発

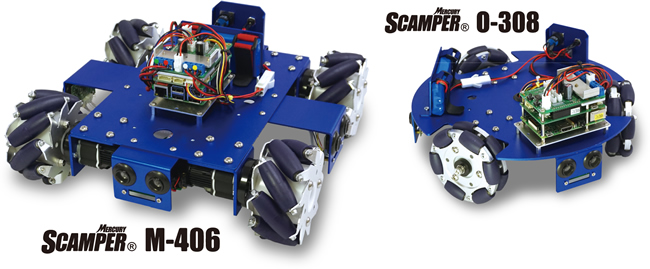
Scamper® M-406
Scamper® M-406は、4輪のMecanumホイールと、4個の超音波センサーを搭載した、障害物を検知して自律走行が可能な研究・開発・教育用モバイルロボットプラットフォームです。
拡張性の高いRaspberry Pi®をオンボードコンピュータとして搭載し、専用電源I/O基板と専用モータドライバー基板を搭載しています。
専用電源I/O基板は、RS232C・RS485・CANバスの接続が可能、USBポートはRaspberry Pi®基板への接続が可能です。
また、USBカメラを用いた簡単な画像処理を行う事も可能です。
- W310 × L320 × H138mm
- Mecanum Wheel(100mm)× 4
- DCモータ(エンコーダ付)× 4
- 超音波センサ× 4
- RasPi3・モータドライバPCB・電源I/OPCB
Scamper® O-308
Scamper® O-308は、3個のOmniホイールと、3個の超音波センサーを搭載した、回転不要であらゆる方向・角度に移動出来る研究・開発・教育用モバイルロボットプラットフォームです。
拡張性の高いRaspberry Pi®をオンボードコンピュータとして搭載し、専用電源I/O基板と専用モータドライバー基板を搭載しています。
専用電源I/O基板は、RS232C・RS485・CANバスの接続が可能、USBポートはRaspberry Pi®基板への接続が可能です。
また、USBカメラを用いた簡単な画像処理を行う事も可能です。
- Φ290 × H135mm
- Omni Wheel(100mm)× 3
- DCモータ(エンコーダ付)× 3
- 超音波センサ× 3
- RasPi3・モータドライバPCB・電源I/OPCB










